

自動運転車について
自動運転車は、これからどのようにして普及していくのだろうか。ドライブは、運転すること自体が楽しいので自動運転なんて必要ないと思う一方で、疲れた時や眠い時などに安全に運転できるものならそれは便利だとも思う。
未来社会を思い描いてみると・・・、車に乗って目的地に到着して、正面玄関の前で車から降りる。その時、駐車場に止めてくるよう指示をしておけば自動で走っていく。帰りもまた自分の車を自動で呼び出すことができる。このような未来に向かっているということだ。
そこまで自動化しなくても、危険があれば警告する、緊急停止するレベルの安全装置はあった方が良いと思う。
自動化のレベル vs 安全のレベル
自動化にあたっては、安全と法整備の関係で、自動化を実現する段階が考慮されている。それを自動化のレベルといい、レベル0からレベル5まで定義されている。国土交通省の「自動運転車の安全技術ガイドラン 平成30年9月」から引用する。
これはSAE(Society of Automotive Engineers, Inc. / 米国自動車技術者協会)という民間の団体が設定したものに準拠している。2016年にアメリカのSAEが改定すると、日本の国土交通省も追随して改定した。
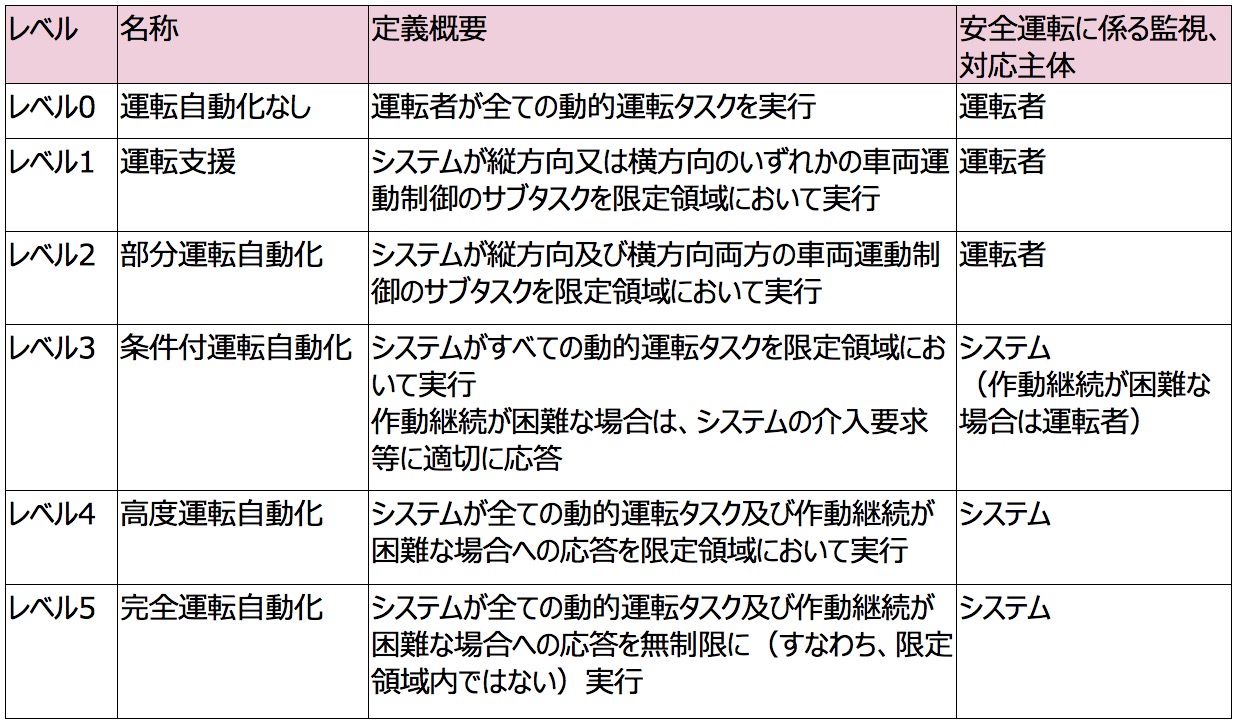
この定義で不可解に思われるのは、レベル3である。レベル3では「作動継続が困難な場合は運転者」という但し書きがあり、ある時点で突然に、安全の責任が運転者へ渡される。システムが対応できない時というのは、何らかの想定外の事象が発生した時である。急に運転者に渡されても困るのではないだろうか。
レベル2よりもレベル3の方が危険が大きい可能性もある。自動化のレベルは、安全のレベルとは関係していないことは問題ではないのか。
日本政府の目標
日本では、運転を補助するシステムへの規制が厳しかったため、自動運転技術の開発では世界から一歩遅れを取っている。今では政府が後押しして、一気に追いつこうとしている。2018年度時点での政府の目標は、次の通りだ。
-
- 2020年までに、高速道路での高度な自動運転(レベル3以上)の市場化や限定地域における無人自動運転移動サービス(レベル4)の実現
- 2025年を目途に、高速道路における完全自動運転(レベル4)の市場化等
危険が回避できない時
自動運転の技術が高度になり、自動化の精度がどれだけ高まったとしても、やはり予測できないアクシデントは起こりうる。自動車自体が故障によってブレーキやハンドリングが突然機能しなくなるかもしれないし、あるいは突然の直下型大地震に見舞われるかもしれない。上空から落下物があるかもしれないし、突然人が飛び出してくるかもしれない。
システムがどうしても危険を避けきれないと判断した時に、システムは一体どのように行動すればよいのか。つまり、運転者の命を守るのか、歩行者の命を守るのか。あるいは、左側の子供を守るのか、右側の老人を守るのか。
ここで出てくるのが、トロッコ問題である。英語ではtrolley problemと言う。路面電車のことである。
トロッコ問題とは?
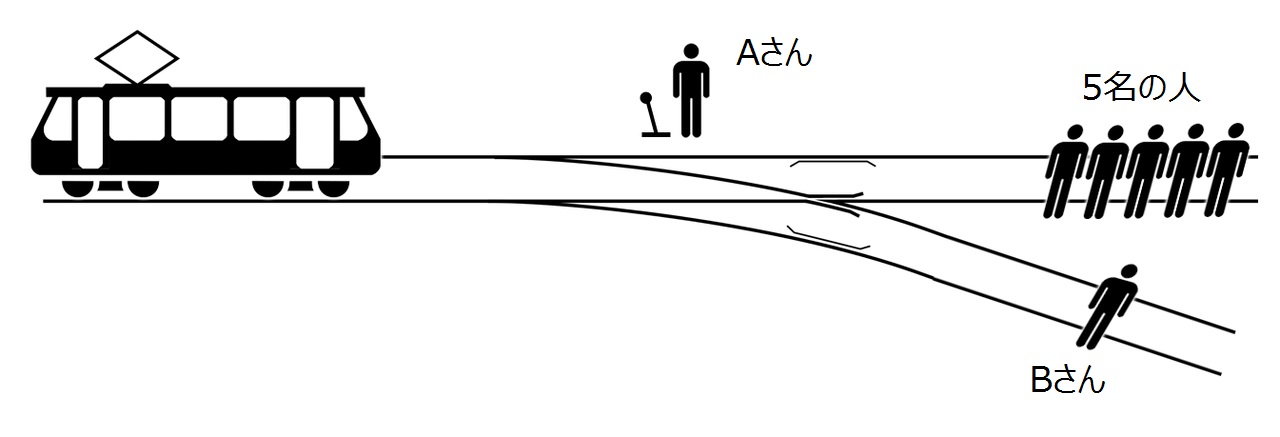
線路を走っていたトロッコ(あるいは路面電車)の制御が不能になった。このままでは前方で作業中だった5人が猛スピードのトロッコを避ける間もなく轢き殺されてしまう。
この時、ポイント切り替え機の前にちょうどAさんがいる。
Aさんがトロッコのポイントを切り替えれば5人は確実に助かる。しかし、切り替えた先の線路にはBさんが作業しており、5人は助かる代わりにBさんはトロッコに轢かれて死んでしまう。
(A) この状況で、Aさんはトロッコを別の線路に引き込むべきか?
善悪の問題(道徳・倫理学)
もし、Aさんがポイントを切り替えたとして、この行為は道徳的に許されるか、許されないかを問う問題である。イギリスの哲学者のフィリップ・フット(Philippa Ruth Foot)が提起した。
多くの国で様々な階層で調査されている。ある学校の哲学のクラスでは学生に「ポイントを切り替えるべきかと?」と質問すると8割から9割の人が「切り替える」と答えたそうだ。より多くの人を助けるのが人道的という考え方である。
ではここで、同じ状況について、少し質問の仕方を変えてみよう。
(B) あなたが実際にポイントの前にいたらどうするか?
と質問されると「切り替える」と答える人は減って、6割程度になったという。この質問は、アメリカの哲学者ジュディス・ジャーヴィス・トムソンが提起したものである。当事者として関わるとなると、純粋に道徳的な観念とはまた少し違った反応になるということを示している。
やはり、当事者としてポイントを切り替えるとなると、もっと現実的に考えるようになるからだろう。事故の目撃者から、いきなり当事者に変わってしまう。これは大きな違いだ。ましてや、BさんがAさんの知り合いだったり、利害関係があったりする可能性があるなら、容易には関与できない。
トロッコ問題のバリエーションでは「太った人」問題がある。これもジュディス・ジャーヴィス・トムソンが考案した問題である。
今度はポイントや引き込み線のないトロッコがある。線路の先には5人が作業している。Aさんはトロッコと5人の真ん中にいる。そして、Aさんの目の前に太った人がいて、この人を突き落とすとトロッコを止めることができる。Aさんでは体重が軽すぎてトロッコを止められない。太った人を突き落とすことは至って容易で、突き落とせば確実に停止できる。
(C) このような状況で、太った人を突き落とすのは「許されるか?」
この質問には大多数の人が「許されない」と答える。5人を助けるために1人を犠牲にするのは、最初の質問と同じであるのに、答えは逆転する。
ポイント切り替えでは、「どちらかを選ぶ」ことが行為の全てであるが、「突き落とす」場合には最初に殺人があるということだ。そもそも「殺人」自体が悪いことだという観念が働くからだ。
1人が犠牲となり5人が助かるという共通点はあるけれども、前者は許容され、後者は許容されない。
ということは、最初の問題(A)では功利主義的な解釈が一般的になされるが、問題(C)では義務論で判断されるということになる。5人を助けるために、関係のない1人を巻き込んで殺すことは許されないと一般に考えられるからだ。
善悪の判断というのは思っている以上に複雑である。
功利主義(Utilitarianism):社会全体の幸福を重視する考え方。古くからある考え方だが、18世紀にジェレミ・ベンサムが体系化し、「最大幸福原理」を論じた。結果を重視する。
義務論(Deontology):カントが提唱した、常に成り立つ「善」を考え、それに反することは行うべきではないという考え方。人間に備わる無条件に良いものを「善意志」とした。結果よりも動機を重視する。
自動運転とトロッコ問題
完全な自動運転では運転者が判断をしないので、事前にシステムにどのようにすべきかを組み込まないとならない。結論を出さないとならなくなった。
トロッコ問題では、大多数が功利主義的な判断を受け入れている。自動運転では、太った人を突き落とす必要もなく、ポイント切り替えは自動車の操舵判断との類似性が高い。
では、功利主義の原則「生存者最大化主義」で良いのだろうか。ある例で考えてみる。山間の道路を走って下っている。片側は山肌で片側は崖になっている。ブレーキが利かなくなりどんどんスピードが速くなっていく。この先もまだたくさんのカーブがある。
生存者最大化の矛盾
山側に車をこすりつければスピードを落として止まれるかもしれない。そうすれば運転者は助かるだろう。
ところが山側には登山者がたくさん並んで歩いている。スピードはどんどん上がって、もう次のカーブは曲がれない。
生存者最大化主義であれば、どのように解決されるのだろうか。つまり、この場合は登山者を傷つけないよう、車を谷底に落とすことになる。運転者を犠牲にするという判断がなされるわけだ。
社会全体の利益を守るのは良いけれど、運転手が最大限守られるのではないというのは、ちょっと敬遠したくなる。とは言うものの、運転手を守るために歩行者をなぎ倒すようなことがあれば、もう怖くて車には乗れないだろう。
あくまでも安全を追求
ここまで長々とトロッコ問題を書いてきたが、そもそもトロッコ問題は現実的なのか。プログラマーとしては、究極の状況下のロジックを考えたくなるのだろうが、そもそもどれだけの確率でこのような状況に陥るのか。
日常的に車の運転をしていて、30年無事故無違反という人はたくさんいる。AIでは、このような運転を目指していけば良いのである。無駄なく早く到着したいと欲を出せば、安全性は二の次になってしまう。
自動運転車という機械が、人間の生死を判断するということは、倫理的に有り得ないことだ。老人か子供かどちらを選ぶ、ではなく、誰をも傷つけないという方向性があるはずである。アイザック・アシモフのロボット3原則が想起される。だから、どちらを選ぶという判断をシステムに組み込むべきではない。
例えば、最新の地図情報をベースにして、信号のあるはずの交差点で何らかの障害があって信号が確認できなかったら、スピードを落として状況を確認する必要があるのだ。こうした基本的なところでまだ開発の課題は多い。どうやって信号のない交差点で他の車と譲り合うのか。どうやって相手の運転手の表情や仕草を読み取るのか。
自動運転車はちょっとスピードを出してもいいから、自車も周囲の人や車も安心できる安全運転をしてもらいたい。